
The Ant-Roach
This article has been a long time coming. Let us introduce Otherlab's 15 foot inflatable walking robot, the Ant-Roach. Conceptually it was meant to be an elephant, but we thought it looked more like a cross between an anteater and a cockroach, hence the name. The goal of building the Ant-Roach was to demonstrate the carrying capacity and high strength-to-weight ratios possible with inflatable structures.
In this picture, four familiar faces ride the robot, while the one below shows Pete Lynn hefting the whole thing (deflated of course).

The muscles are textile-based actuators which contract upon inflation. The picture below shows a stack of them during construction.

The muscles are driven from several central manifolds which dispense compressed air.

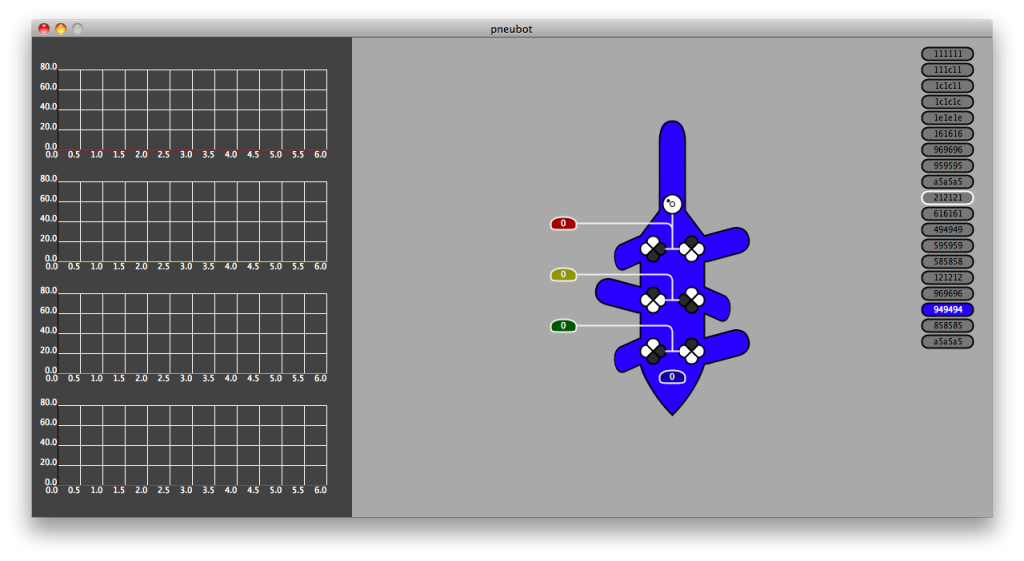
A microcontroller receives a wireless signal from a laptop running the control program shown below to drive the robot.
Here's some footage:
The Ant-Roach is a result of progression in simulation and fabrication for inflatable robotics. If you haven't seen the newest robotic arm , you should check it out. For completeness, here's some very early footage of the first walking elephant:
Related Blog Posts

